
1. Շրջանաձև հյուսելու մեքենայի տեխնոլոգիայի ներդրում
1. Շրջանաձև հյուսելու մեքենայի համառոտ ներածություն
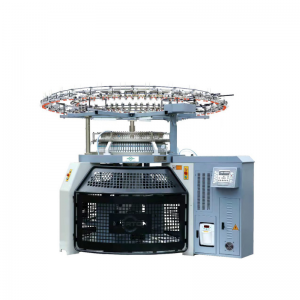
Շրջանաձև գործվածքով մեքենան (ինչպես ցույց է տրված նկար 1-ում) սարք է, որը բամբակյա թելը հյուսում է խողովակաձև կտորի մեջ։ Այն հիմնականում օգտագործվում է տարբեր տեսակի բարձրացված գործվածքներ, մարզաշապիկների գործվածքներ, տարբեր նախշերով գործվածքներ՝ անցքերով և այլն հյուսելու համար։ Կառուցվածքի համաձայն՝ այն կարելի է բաժանել մեկ ջերսի շրջանաձև գործվածքով մեքենայի և կրկնակի ջերսի շրջանաձև գործվածքով մեքենայի, որոնք լայնորեն կիրառվում են տեքստիլ արդյունաբերության մեջ։
 2. Գործընթացի պահանջներ
2. Գործընթացի պահանջներ
(1) Ինվերտորը պետք է ունենա ուժեղ շրջակա միջավայրի դիմադրություն, քանի որ տեղում աշխատանքային միջավայրի ջերմաստիճանը համեմատաբար բարձր է, և բամբակը կարող է հեշտությամբ հանգեցնել սառեցման օդափոխիչի կանգառին և վնասմանը, ինչպես նաև սառեցման անցքերի խցանմանը։
(2) Պահանջվում է ճկուն դյույմային կառավարման գործառույթ։ Դյույմային կոճակները տեղադրված են սարքավորումների բազմաթիվ տեղերում, և ինվերտորը պետք է արագ արձագանքի։
(3) Արագության կարգավորման համար անհրաժեշտ են երեք արագություններ։ Մեկը դյույմային մշակման արագությունն է, որը սովորաբար կազմում է մոտ 6 Հց, մյուսը՝ սովորական հյուսման արագությունն է, որի առավելագույն հաճախականությունը հասնում է մինչև 70 Հց, իսկ երրորդը՝ ցածր արագությամբ հավաքման գործողությունը, որը պահանջում է մոտ 20 Հց հաճախականություն։
(4) Շրջանաձև կարի մեքենայի աշխատանքի ընթացքում շարժիչի շրջադարձը և պտույտը բացարձակապես արգելված են, հակառակ դեպքում ասեղի մահճակալի ասեղները կծռվեն կամ կկոտրվեն: Եթե շրջանաձև կարի մեքենան օգտագործում է միաֆազ կրող, սա հաշվի չի առնվի: Եթե համակարգը պտտվում է առաջ և հետ, դա ամբողջությամբ կախված է շարժիչի առաջ և հետ պտույտից: Մի կողմից, այն պետք է կարողանա կանխել հակառակ պտույտը, իսկ մյուս կողմից, այն պետք է կարգավորի հաստատուն հոսանքի արգելակում՝ պտույտը վերացնելու համար:
3. Կատարողականի պահանջներ
Հյուսելիս բեռը մեծ է, և դյույմերի/մեկնարկի գործընթացը պետք է արագ լինի, ինչը պահանջում է, որ ինվերտորը ունենա ցածր հաճախականություն, մեծ պտտող մոմենտ և արագ արձագանքման արագություն: Հաճախականության փոխարկիչը ընդունում է վեկտորային կառավարման ռեժիմ՝ շարժիչի արագության կայունացման ճշգրտությունը և ցածր հաճախականության պտտող մոմենտի ելքը բարելավելու համար:
4. Կառավարման լարեր
Շրջանաձև հյուսելու մեքենայի կառավարման մասը օգտագործում է միկրոկառավարիչ կամ PLC + մարդ-մեքենա ինտերֆեյսի կառավարում: Հաճախականության փոխարկիչը կառավարվում է տերմինալներով՝ մեկնարկի և կանգառի համար, իսկ հաճախականությունը տրվում է անալոգային քանակով կամ բազմաստիճան հաճախականության կարգավորմամբ:
Բազմաարագության կառավարման համար կան հիմնականում երկու կառավարման սխեմաներ։ Մեկը հաճախականությունը կարգավորելու համար անալոգայինի օգտագործումն է։ Անկախ նրանից, թե դա վազք է, թե բարձր արագությամբ և ցածր արագությամբ աշխատանք, անալոգային ազդանշանը և շահագործման հրահանգները տրվում են կառավարման համակարգի կողմից, մյուսը՝ հաճախականության փոխարկիչի օգտագործումն է։ Ներկառուցված բազմաստիճան հաճախականության կարգավորումը, կառավարման համակարգը տալիս է բազմաստիճան հաճախականության փոխարկման ազդանշան, վազքը տրամադրվում է ինվերտորի կողմից, իսկ բարձր արագությամբ հյուսման հաճախականությունը տրվում է ինվերտորի անալոգային քանակի կամ թվային կարգավորման միջոցով։
2. Տեղում պահանջներ և շահագործման հանձնման պլան
(1) Տեղում պահանջներ
Շրջանաձև գործելու մեքենաների արդյունաբերությունը համեմատաբար պարզ պահանջներ ունի ինվերտորի կառավարման գործառույթի համար: Սովորաբար, այն միացված է տերմինալներին՝ մեկնարկը և կանգառը կառավարելու համար, տրվում է անալոգային հաճախականություն, կամ օգտագործվում է բազմարագություն՝ հաճախականությունը սահմանելու համար: Արագ աշխատանքի համար անհրաժեշտ է դյույմային կամ ցածր արագությամբ աշխատանք, ուստի ինվերտորը պետք է կառավարի շարժիչը՝ ցածր հաճախականությամբ մեծ ցածր հաճախականության պտտող մոմենտ ստեղծելու համար: Ընդհանուր առմամբ, շրջանաձև գործելու մեքենաների կիրառման դեպքում հաճախականության փոխարկիչի V/F ռեժիմը բավարար է:
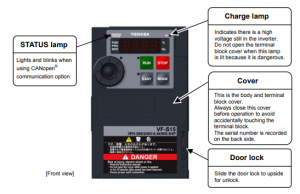
(2) Սխեմաների շտկման համար։ Մեր կողմից ընդունված սխեման հետևյալն է՝ C320 շարքի անզգայացնող հոսանքի վեկտորային ինվերտոր։ Հզորությունը՝ 3.7 և 5.5 կՎտ։
3. Կարգավորման պարամետրեր և հրահանգներ
1. Էլեկտրական սխեմա
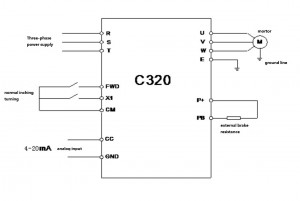
2. Debug պարամետրի կարգավորում
(1) F0.0=0 VF ռեժիմ
(2) F0.1=6 հաճախականության մուտքային ալիքի արտաքին հոսանքի ազդանշան
(3) F0.4=0001 Արտաքին տերմինալի կառավարում
(4) F0.6=0010 հակադարձ պտույտի կանխարգելումը վավեր է
(5) F0.10=5 արագացման ժամանակ 5S
(6) F0.11=0.8 դանդաղեցման ժամանակ 0.8S
(7) F0.16=6 կրող հաճախականություն 6K
(8) F1.1=4 Մոմենտի ուժեղացում 4
(9) F3.0=6 X1-ը սահմանել առաջ շարժման համար
(10) F4.10=6 սահմանեք վազքի հաճախականությունը 6 Հց-ի
(11) F4.21=3.5 Սահմանեք վազքի արագացման ժամանակը 3.5 վայրկյանի վրա
(12) F4.22=1.5-ը սահմանում է վազքի դանդաղեցման ժամանակը 1.5 վայրկյանի
Նշումներ վրիպազերծման համար
(1) Նախ, շարժեք շարժիչի ուղղությունը որոշելու համար։
(2) Վազքի ժամանակ թրթռման և դանդաղ արձագանքի խնդիրների վերաբերյալ, վազքի արագացման և դանդաղեցման ժամանակը պետք է ճշգրտվի պահանջներին համապատասխան։
(3) Ցածր հաճախականության պտտող մոմենտը կարող է բարելավվել կրող ալիքի և պտտող մոմենտի ուժեղացման կարգավորման միջոցով։
(4) Բամբակը խցանում է օդային խողովակը և օդափոխիչի կանգառները, ինչը հանգեցնում է ինվերտորի ջերմության վատ ցրմանը: Այս իրավիճակը հաճախ է պատահում: Ներկայումս ընդհանուր ինվերտորը բաց է թողնում ջերմային ազդանշանը, ապա ձեռքով հեռացնում է օդային խողովակի մնացորդները՝ շարունակելով օգտագործել այն:
Հրապարակման ժամանակը. Սեպտեմբերի 08-2023